毕设课题
1 已完结
1 搬运机器人末端夹持机构的设计与开发
2 变磁力吸附爬壁机器人设计与开发
3 车载式多自由度机械臂的设计与实现
4 仿生机器狗步态规划与智能控制
5 仿生机械手的控制方法研究
6 基于电机驱动的机器人抓手的设计与控制
7 基于Arduino的机器狗设计与控制
8 基于OpenCV的机械手交互控制方法研究
9 基于PID控制的自平衡自行车设计
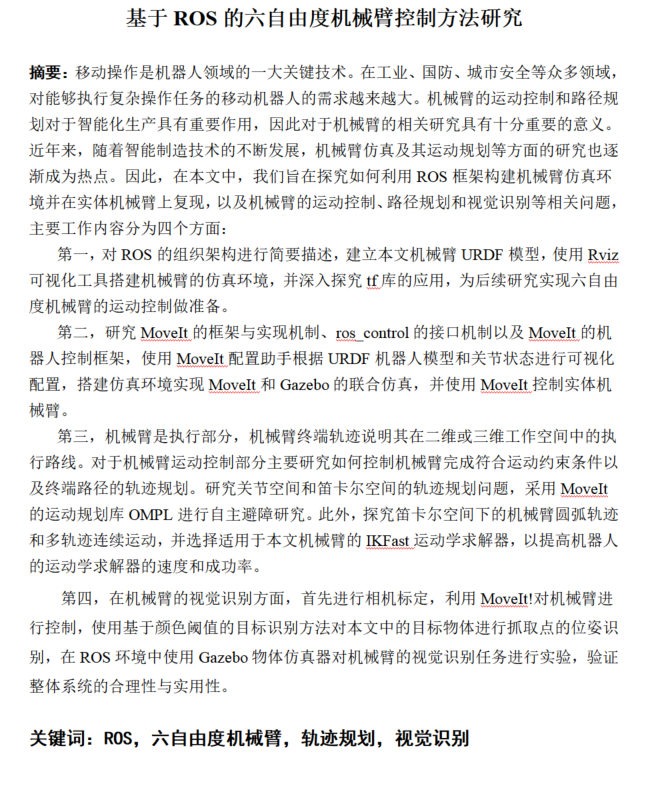
10 基于ROS的六自由度机械臂控制方法研究
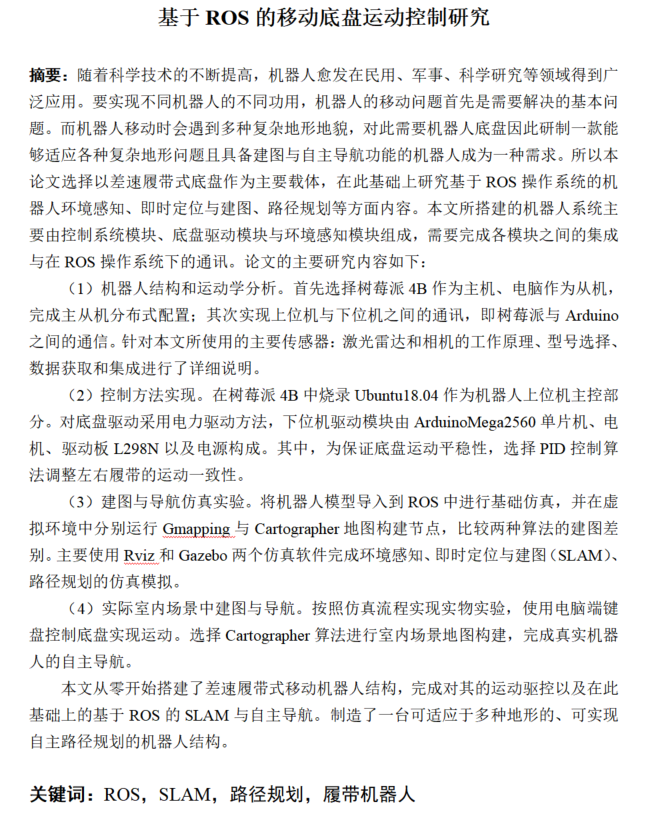
11 基于ROS的移动底盘运动控制研究
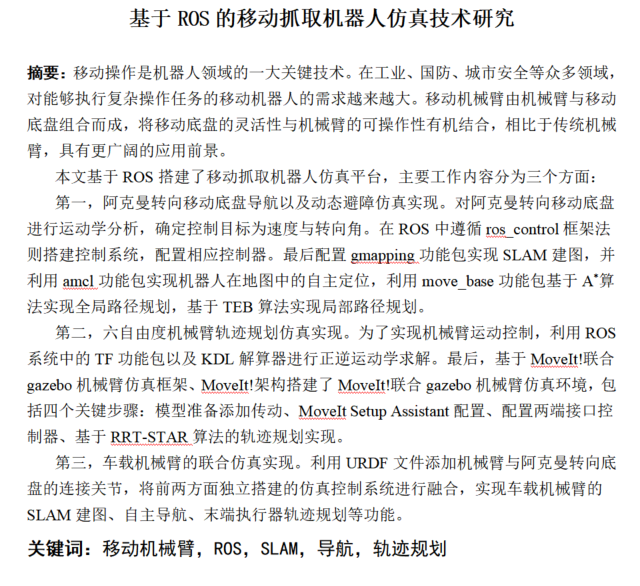
12 基于ROS的移动抓取机器人仿真技术研究
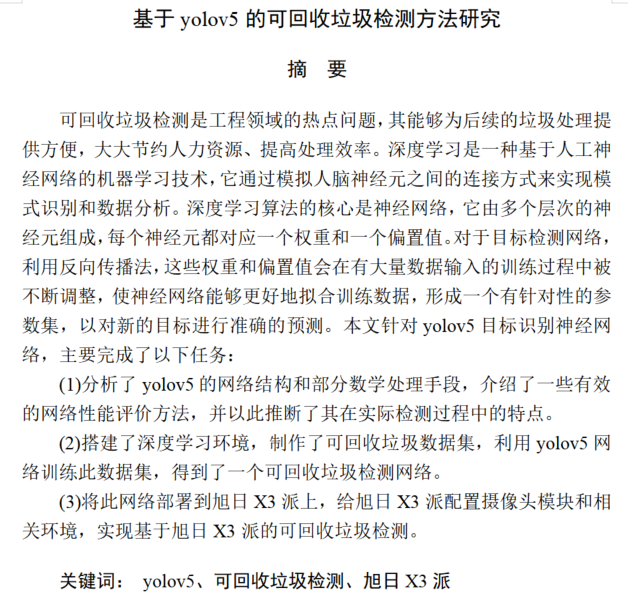
13 基于yolov5的可回收垃圾检测方法研究
14 机械仿生手设计
15 移动机器人多目标点路径规划问题研究
16 轮式机器人底盘结构的设计与实现
2 进行中
1 基于关键点估计的3D目标检测方法研究
2 基于ChatGPT机理的语音交互系统研究
3 基于STM32的移动机器人运动控制方法研究
4 动态环境中移动机器人自主探索及建图方法研究
5 基于ROS的机械臂视觉抓取方法研究